Kan @Jukka_Lepikko kommentera dessa usla Cybertruck-siffror? Det här skulle ju vara århundradets produkt! Man skrattade åt mig när jag sa att det inte skulle bli något betydande för Tesla och bland annat kommenterade man att mina meddelanden inte längre kunde tas på allvar.
Där Jukka, en diskussion från 2023, då du ifrågasattes om hur man kan beräkna framtida vinst för Cybertruck när leveranserna ännu inte rullade och produkten inte övertygade. Då var de enorma orderböckerna (icke-bindande) enligt dig en giltig grund och det fanns en åsikt om hur CT också genererar vinst för Tesla och bör beaktas i värderingen. Om man bläddrar igenom meddelandena där lite mer får man en ännu bättre bild av vem som sa vad, men du har starkt försvarat CT:s förmåga att generera vinst och även nämnt att den är en betydande modell för Tesla.
Det är bra att du deltar i diskussionen, men ibland skulle det vara bra att säga “jag hade fel”. Och detsamma gäller för björnarna.
Det verkar som att Cybertruck kommer att bli ett samlarobjekt istället för en massproducerad produkt.
Under det senaste kvartalet har cirka 5000 enheter sålts och trenden har vänt nedåt. I och för sig gav bilens avvikande utseende anledning att förvänta sig att bilen inte skulle uppnå stor popularitet. Om bilen inte hade Teslas kultvärde, skulle försäljningen vara ännu betydligt svagare.
Tesla har pausat produktionen av Optimus-roboten efter ett ledarskapsbyte och pågående designrevideringar.
Den nya projektledaren, Ashok Elluswamy, syftar till att åtgärda prestanda- och hårdvarufel innan produktionen återupptas.
Det ursprungliga produktionsmålet på 5 000 enheter för 2025 kommer nu sannolikt inte att uppnås.
Tesla kan komma att avslöja en omdesignad Optimus vid sitt nästa aktieägarmöte för att lugna investerare.
Vid sidan av företagsturbulens står Optimus fortfarande inför olösta tekniska utmaningar. Enligt Teslas feedback till leverantörer är robotens leder benägna att överhettas, de fingerfärdiga handmekanismerna lider av låg hållbarhet, och dess batteritid är otillräcklig för längre uppgifter. Roboten testas för närvarande i Teslas batteriverkstäder, där dess effektivitet rapporteras vara mindre än hälften av mänskliga arbetares.
Så FSD fungerar bara i ett litet område med stöd av säkerhetsförare och teleoperatörer, bilförsäljningen stannar av och nu ser även denna Optimus ganska skakig ut.
Nu kan (borde) man redan konstatera att Cybertruck är en stor flopp, eller är den det ändå inte, med tanke på utseendet och att det inte är en pickup, vilket för en bil i den storleksklassen skulle vara ett viktigt element i USA.
Tydligen har även investerarna förstått detta, och försäljningen påverkar inte aktiekursen när man tittar på volymerna för Cybertruck.
Detta har ju hela tiden följt Theranos-handboken. Man ger löften som tekniken ännu inte kan leva upp till. Frågan är snarare hur långt in i framtiden löftena ligger i förhållande till verkligheten. Lyckligtvis har man hittills hållit sig inom tekniksektorn och inte till exempel inom hälsovården, så problemen drabbar främst tekniknördsgänget som ändå är vana vid att allt inte alltid fungerar helt perfekt.
Har användningen av FSD nu begränsats från USA till någon annanstans, och har FSD nu en teleoperatör i bakgrunden? Källa till detta? Användningen av Robotaxi utökas åtminstone, då man nu kan få skjuts i Austin-området genom att begära tillgång från Tesla.
Ur ett annat perspektiv kan detta ses som att mycket nytt är på gång inom bilförsäljningen, ROW-försäljningen och juni visade redan riktningen. Optimus-teamet förstärks med Ashok. Låt oss se om Q2-siffrorna pekar mot förstörelse eller om verksamheten fortsätter även nästa år?
Ur ett finskt ekonomiskt perspektiv skulle man kunna ta en sådan Tesla-synpunkt att vågar Tesla anställa ny personal om affärsutsikterna vore så dystra. Tja, i Kalifornien finns 690 välbetalda jobb öppna och även i Finland 10 arbetsplatser.
Jag zoomar ut igen, på mitt vanliga sätt, till ett tidsmässigt fågelperspektiv för att lättare kunna granska hur FSD har utvecklats:
Hur vet man att betydande utvecklingssteg har tagits i FSD:s utvecklingskurva? Jo, av att TeslaQ:s argumentation hamnar på “falsk video”-nivå. Det hände senast den 27.8.2023, när FSD V11:s senaste uppdateringsversioner visade sin förmåga innan man övergick till en 100% AI-baserad end-to-end-lösning:
Vad som gör detta särskilt roligt är det faktum att TeslaQ-medlemmar i sin Tesla-hat-extas drar sin egen argumentation i en fullständig knut: Youtube-videor där FSD gör misstag är alltid vattentäta bevis på FSD:s teknologiska svaghet, men videor där körprestationen är förvånansvärt bra är fejk!
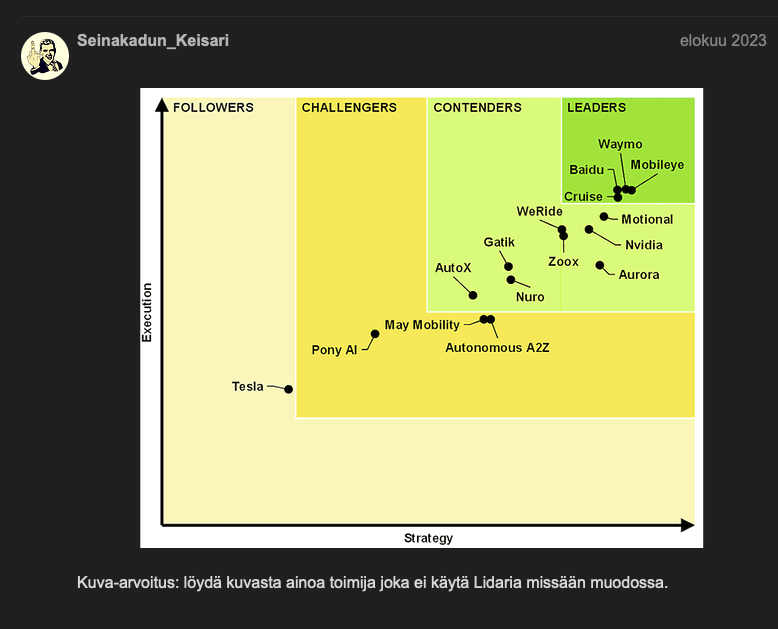
FSD:s utveckling kan observeras direkt genom att gå igenom Inderes-diskussionen: för ett par år sedan hånades det under Keisaris ledning hur FSD misslyckades med Seattles monorails stödpelare i Gals videor. Nu är det sommaren 2025, och vid det här laget är det nog klart även för Keisari att monorail-problemet redan är löst tack vare växande träningsdata och beräkningskapacitet. Eller tror Keisari fortfarande på sina egna påståenden att “alla experter anser att lidar krävs”. Förstår Keisari också varför vi Tesla-bullar tyckte att dessa grafer var helt löjliga?
Mitt meddelande avfärdades av JukkaM, som själv har utnämnt sig till expert på autonomi hos Inderes. JukkaM hänvisade till andra konkurrenters lidars, HD-kartor och radar. Numera har JukkaM också förstått att end-to-end är den rätta lösningen. JukkaM tvivlade fortfarande på den globala expansionen av end-to-end-lösningen i början av förra året:
När detta meddelande skrivs släppte Tesla en ny FSD-video från Madrid. Tidigare under våren har videor kommit från bland annat Amsterdams, Roms och Melbournes centrumområden. Dessutom fick FSD att fungera förvånansvärt bra i Kina trots att det inte fanns inhemsk träningsdata på grund av kinesisk lagstiftning. Hur har din syn, JukkaM, utvecklats sedan för ett år sedan?
Mina åsikter från den kommentar du hänvisar till har förfinats, ju mer jag bland annat har läst Wayves papper.
Jag är ingen expert på autonomi, jag har bara själv ansvarat för arkitekturen (från mjukvaruarkitektur till företagsarkitektur) för stora företag i finsk skala, med budgetar >10 miljoner euro under mitt ansvar.
År 2021 arbetade jag också som CTO och mjukvaruarkitekt i en startup inom autonom körning. Finansieringen tog slut, men jag hann designa och koda ett autonomt körsystem som kördes ovanpå Robot Operating System (ROS) för en simulator som använde neurala nätverk.
Jag litade inte på Teslas FSD, på grund av Andrej Karpathys tillvägagångssätt där visionsdelen blåstes upp till en monolit som lappades ihop med cacheminne.
Andrej kommenterade själv problemen med sin lösning. Andrej Karpathy är en guru som Python-kodare, men han abstraherar inte lösningen på en högre nivå först, som topparkitekter gör.
Även på ledningsnivå gör Elon Musk eller till exempel Jensen Huang detta, och kan därför leda företagets strategi.
De första tecknen på Teslas förändring för mig var Ashok Elluswamys presentation på CVPR23 Ashok CVPR23.
Där gick Ashok igenom World Model-lösningen och tillvägagångssättet var annorlunda än Karpathys. Mycket mer holistiskt.
Jag har aktivt följt Wayve och Yann LeCuns arbete sedan 2022 års paper “A Path Towards Autonomous Machine Intelligence”.
Wayve har sagt att de använder LeCuns V-JEPA för att bilda World Models vektorrum. Jag vet inte om Tesla, men de verkar göra något liknande.
Eftersom du, baserat på dina kommentarer, inte vet vad Teslas konkurrensfördel kan vara, så här är det på konceptnivå.
Låt oss också nämna att grafer om hur nära man är mänsklig intelligens inte bör eller kan ritas, eftersom AI-modeller inte fungerar som hjärnor. De utför inte medvetet och kreativt tänkande baserat på vad de har lärt sig, utan beräknar sannolikheter.
Traditionell mer avancerad AI-baserad (t.ex. Waymo, Mobileye)
Baseras på en modulär struktur: Perception → Prediction → Planning → Control
Tränas huvudsakligen med märkt data (supervised learning) för att identifiera specifika objekt, såsom bilar, fotgängare, trafikljus etc.
Använder separata Transformer-baserade modeller som hanterar olika uppgifter (t.ex. prediktion eller perception).
Prediktion av framtida rutter sker i ett 2D-koordinatsystem på en karta.
I Planning-fasen kan även handkodad regelbaserad logik användas.
Fördelar:
God hanterbarhet och tydlig spårbarhet av fel.
Förståelig och justerbar struktur som är lättare att certifiera och granska.
End-to-End BEV-baserad (öppnas inte här, eftersom Tesla inte längre använder denna modell i sitt senaste system)
End-to-End World Model -baserad (t.ex. Wayve, Tesla, många kinesiska aktörer)
Modellen tränas huvudsakligen med oetiketterad data (self-supervised learning), ofta enbart från videor.
Videorna består av sekventiella bilder, från vilka modellen över tid lär sig objektens 4D-egenskaper (3D-form + tidsutveckling).
Information om objektens visuella, semantiska och rörelserelaterade egenskaper lagras i ett vektorrum.
Resultatet är en slags “mänsklig” uppfattning av den omgivande världen, där objekt, deras dynamik och beteende förstås i sitt sammanhang.
Körvägar förutsägs genom att skapa realistiska simulerade framtida världstillstånd – alltså inte bara enskilda punkter på en 2D-karta.
Körning och funktionskontroll lärs ut med t.ex. Reinforcement Learning (RL) eller Imitation Learning (IL) -metoder, varvid kontrollen baseras på inlärda erfarenheter.
Utmaningar:
Att träna modellen kräver mycket stora mängder mångsidig videodata för att den ska lära sig att generalisera till olika situationer.
Mindre transparent och svårare att kontrollera än den traditionella modellen. Detta förbättras dock kontinuerligt i takt med att tekniken utvecklas.
Sammanfattningsvis:
Den traditionella modellen är mer hanterbar, tekniskt mer transparent. Ett alternativ för de som spelar säkert.
End-to-End World Model baseras på en mer mänsklig förståelse av omgivningen och erbjuder ett smidigare, mer naturligt körbeteende. Ett troligt framtida alternativ. Frågan är hur snabbt det kan göras tillförlitligt.
Därför kommenteras det ofta i Tesla vs Waymo-jämförelser: Waymo kör säkert och kantigt, medan Tesla kör smidigare och mer mänskligt.
AI och 99.999% felfrihet är en svår kombination. Till exempel gör ChatGPT fortfarande nybörjarfel.
Det är svårt att jämföra Waymos och Teslas tekniska lösningar, eftersom så lite är känt om dem. Vore det inte bättre att jämföra funktionaliteten, det vill säga miles per disengagement.
Det är absolut viktigt att jämföra funktionalitet när Tesla väl får igång sin robotaxiverksamhet ordentligt. Förhoppningsvis kommer myndigheterna att kräva jämförbar rapportering, även om det är miles per disengagement.
Anledningen till att även investerare bör vara intresserade av tekniska lösningar är att det tar år att förnya en lösning.
Waymos lösning är ganska välkänd, eftersom särskilt Waymos Head of Research Drago Anguelov har berättat om den här och där.
Å andra sidan har Wayve publicerat artiklar om alla sina lösningar, och därför har end2end World Model spridits även till Kina.
Teslas lösning bygger sannolikt på liknande principer som Wayve.
Jag råkade gissa Karpathys avskedande ganska exakt baserat på de tekniska lösningarna. Å andra sidan är jag inte strikt för någon nuvarande lösning; i ljuset av nuvarande information erbjuder end2end World Model-lösningen bara de flesta utvecklingsmöjligheterna i framtiden.
Om någon faktakontrollerar min text med en språkmodell, så är det viktigt att veta att språkmodeller inte känner till de senaste AI-modellerna särskilt väl, eftersom de inte ingår i träningsdata. Man måste bifoga t.ex. artiklar. Och de känner inte alltid till de gamla heller.
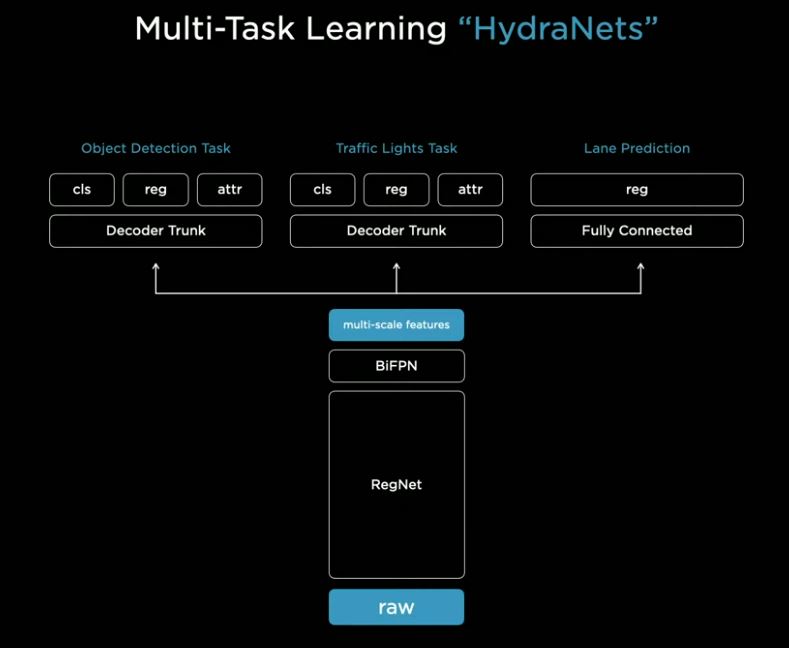
Jag hänvisade i mitt förra inlägg till Karpathys monolit, vars bild finns nedan.
Där är “multi-scale features” delvis en cache, som inte fanns tidigare, och därmed var alla delar av hela lösningen beroende av varandra.
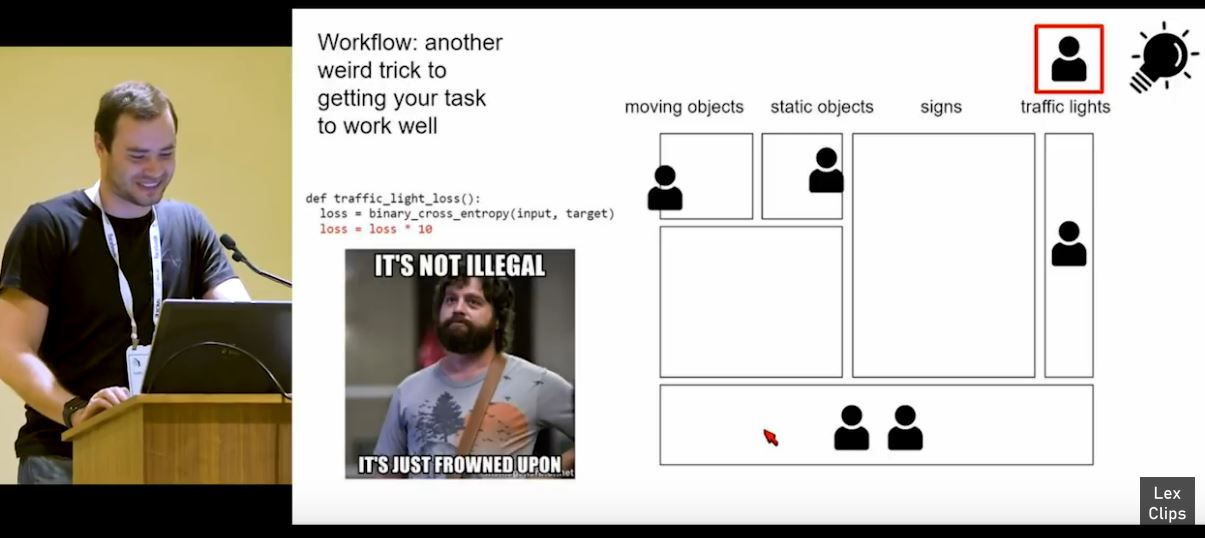
Tidigare var man tvungen att utveckla detta som en enda klump. Karpathy berättar om detta problem i en video från 2019, “Tesla Autopilot and Multi-Task Learning for Perception and Prediction”.
Nedan finns en bild där han illustrerar problemet om olika utvecklare samtidigt ändrar samma klump.
Jag kommer inte att skriva om dessa tekniska saker på ett tag igen, men när Tesla_uskovainen frågade, svarade jag.
Vore det inte dessutom, med tanke på robotaxins lönsamhet, bra att jämföra hur snabbt man kan skala upp användningsområdet och pris/mil-måttet? Självklart är miles/disengagement i slutändan det viktigaste eftersom det är det som gör det möjligt att få tillstånd att bedriva hela robotaxiverksamheten.
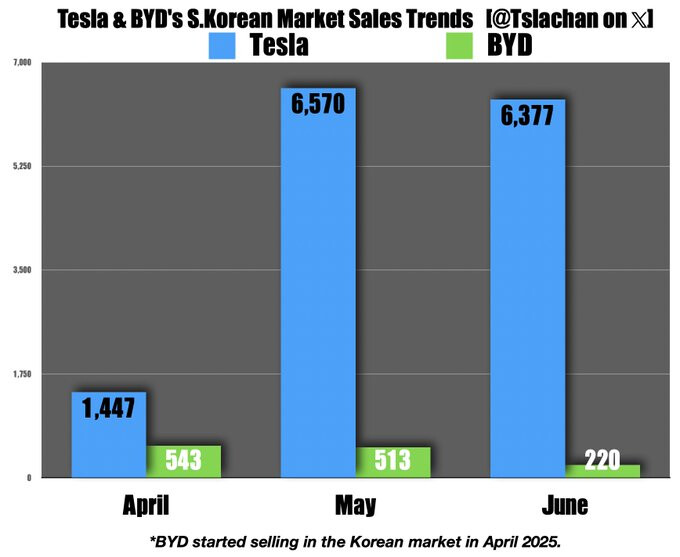
Det lönar sig kanske inte att posta Motorheads första inlägg direkt som grund för en konspiration. Han har redan medgett sitt misstag. Juni månads ROW-försäljning har gått bra totalt sett. Det finns rapporter om detta i media. T.ex. Australien och Korea:
Angående detta. På nätet har jag sett många videor där modifierade Teslor skannar nya områden i Austin. Och inte bara en gång, utan fram och tillbaka och kors och tvärs. Skulle inte detta vara Waymos grej, att göra kartor osv? De borde ju redan ha massor av FSD-data från området, men ändå körs det runt med lidars på taket fram och tillbaka.
Det här var visserligen annorlunda än vad jag stötte på på Reddit, men det verkar vara en ganska tung operation eftersom det tydligen var tiotals bilar.
Som en positiv nyhet fanns det videor där det duggregnade i en robotaxi, så åtminstone verkar inte lite regn vara en showstopper.
Modellträning, kalibrering och validering. De gör samtidigt även HD-kartor inte bara för körning utan jag gissar att de bygger tjänster a la Google Maps ovanpå det senare. FSD i sig behöver inte underhållna HD-kartor eller lidrar för att köra, vilket framgår av att bilen kan kastas var som helst i världen och den kan förmodligen köra där, till skillnad från Waymo som kräver en underhållen HD-karta över körområdet, annars blir det kaos när en oväntad förändring inträffar.
Karpathy berättar om lidarens och HD-kartornas roll i modellträningen:
Det är naturligtvis en bra fråga i vilken utsträckning denna lidar-körning (som för övrigt har gjorts i åratal) behövs för modellutveckling/validering.
Bra sagt! Just därför tror jag att en tillräckligt autonom nivå inte kommer att uppnås förrän om cirka 20-30 år, i takt med att tekniken utvecklas. OBS! Om inte grundfilosofin ändras så att en allmän standard utvecklas som är oberoende av biltillverkarna. Dessutom behövs fast utrustning i vägnätet som stöder autonomi.
På Teslas kartor har också möjliga upphämtningsplatser definierats. Lidar på taket behöver verkligen inte definiera dem. Förmodligen manuellt arbete.
Skulle inte Tesla FSD bara börja fungera överallt?
Inga HD-kartor, ingen geofence, i alla väder, i alla Teslor.
Över en natt skulle Tesla förvandlas till en robotaxi och du skulle kunna ansluta din bil till Teslas robotaxi-flotta. Är detta fortfarande realism eller hur går vi vidare med detta?
Tesla as a taxi company, det verkar åtminstone vara den nuvarande strategin. En geofence i taget, stad för stad. Även i Austin finns det dock fortfarande arbete att göra. 10 taxibilar räcker inte långt.